上海信弘智能科技有限公司,信弘,智能,信弘智能科技,Elite Partner,Omniverse,智能科技,NVIDIA GPU,NVIDIA DGX, vGPU,TESLA,QUADRO,AI,AI培训,AI课程,人工智能,解决方案,DLI,Mellanox,IB, 深度学习,RTX,IT,ORACLE 数据库,ORACLE云服务,深度学习学院,bigdata,大数据,数据安全备份,鼎甲,高性能计算, 虚拟机,虚拟桌面,虚拟软件,硬件,软件,加速计算,HPC,超算,服务器,虚拟服务器,IT咨询,IT系统规划,应用实施,系统集成
Jetson Thor 对比 AGX Orin:算力7.5倍、能效3.5倍,NVIDIA新一代机器人“大脑”赢在哪?
编者荐语:
Thor 开发者套件现已开启预售,开发者与企业用户可通过 ZENTEK 优先订购,抢先体验下一代物理 AI 的算力飞跃!
在机器人技术飞速迭代的当下,算力模块作为“机器人大脑” 的核心,直接决定了设备的功能边界与运行效率。NVIDIA 推出的 Jetson Thor 开发者套件,凭借基于 Blackwell 架构的超强性能、灵活的部署设计及丰富的生态支持,被定位为 “当前最强大的机器人算力核心”,可轻松驱动整个人形机器人、移动机器人或自动驾驶设备,为机器人开发领域带来突破性体验。本文将从硬件参数、设计细节、功能特性、应用场景及产品对比等维度,全面解析 Jetson Thor 的技术优势与价值。
一、核心硬件:Blackwell 架构加持的算力巨兽
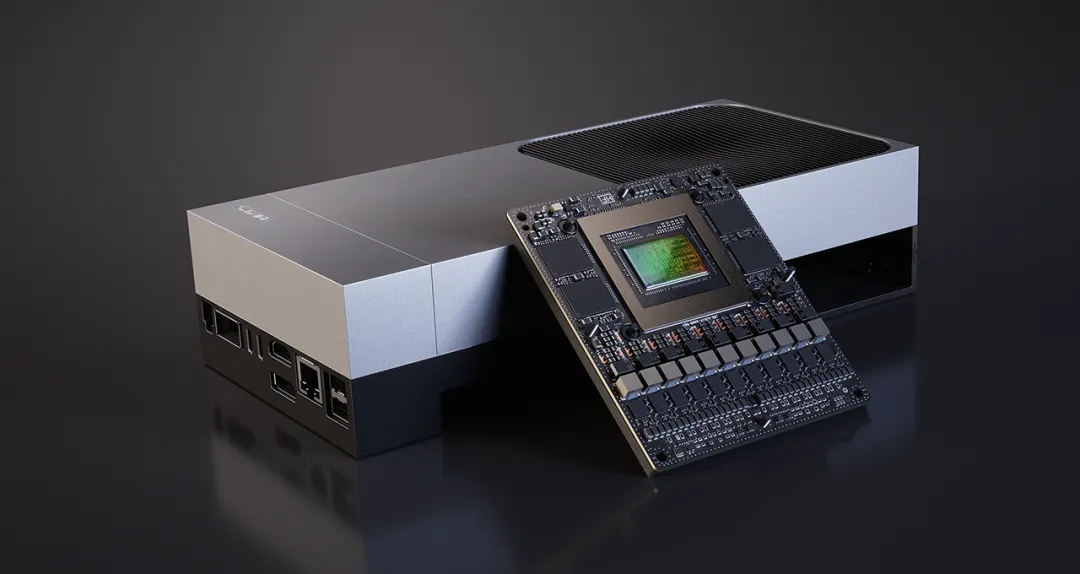
Jetson Thor 的核心竞争力源于其顶尖的硬件配置,专为高负载 AI 任务与机器人控制场景设计。其搭载的NVIDIA Blackwell 架构 GPU,集成了 2560 个 CUDA 核心与 96 个 Tensor 核心 ——CUDA 核心为通用计算提供强大算力支撑,可高效处理机器人运动控制、传感器数据解析等并行任务;Tensor 核心则针对 AI 推理与训练优化,尤其擅长处理计算机视觉、自然语言处理等深度学习场景,为机器人的 “感知” 与 “决策” 提供底层动力。
CPU 方面,Thor 采用 14 核 ARM 处理器,兼顾多任务处理能力与能效比,可同时运行机器人操作系统(如 ROS)、传感器数据采集、运动规划等多个进程,且不会出现算力瓶颈。内存配置更是突破行业常规,配备128GB 高速内存,足以支撑超大规模 AI 模型(如百亿参数级语言模型)的本地运行,无需依赖云端算力,避免了网络延迟对机器人实时控制的影响。
从性能对比来看,Jetson Thor 较前代产品 Jetson AGX Orin 实现了跨越式提升:AI 性能达到 Orin 的 7.5 倍,可处理更复杂的多模态感知任务(如同时解析多摄像头、激光雷达数据);能效比提升 3.5 倍,即在相同算力输出下,Thor 的功耗更低,更适合机器人这类移动设备的续航需求。官方数据显示,其持续算力输出可稳定支撑整个人形机器人的关节控制、环境感知与决策推理,彻底打破了 “微型算力模块无法驱动复杂机器人” 的行业认知。
二、设计细节:紧凑形态与灵活散热的平衡
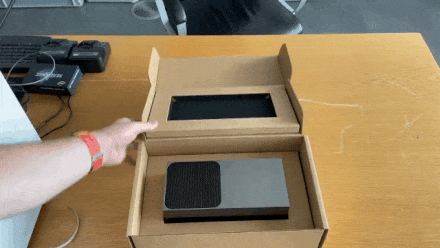
作为面向机器人开发的开发者套件,Jetson Thor 在形态设计上充分考虑了实际部署需求,采用 “核心模块 + 载板” 的组合形式 —— 核心 Jetson 模块尺寸仅为 100mm(长)×87mm(宽)×15mm(高),体积与前代 Orin 相近,可轻松嵌入机器人躯干、关节等紧凑空间;载板则集成了所有外部接口与扩展组件,方便开发者直接测试或快速集成至机器人系统。
1. 散热系统:高负载下的稳定保障
Thor 的散热设计是其持续高性能运行的关键。开发者套件配备了超大尺寸散热片 + 热管 + 双风扇的组合散热方案:散热片覆盖核心发热区域,总面积远超Orin 的散热组件,且内置多根热管,可快速将 GPU、CPU 产生的热量传导至鳍片;底部隐藏式风扇(位于鳍片下方)采用低噪音设计,在提供强劲风力的同时,避免对机器人运行环境造成干扰。
更具创新性的是,Thor 支持 “灵活散热改造”—— 开发者可拆除套件自带的散热片与风扇,将 Jetson 核心模块直接贴合机器人的金属 chassis(底盘 / 躯干),通过 chassis 实现被动散热。这种设计不仅能减少约 30% 的模块重量(对移动机器人的负载控制至关重要),还能避免风扇故障导致的算力节流问题,尤其适合对稳定性要求极高的工业机器人或人形机器人场景。
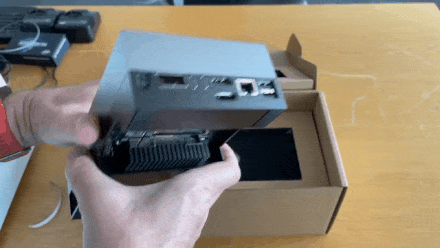
2. 接口配置:集中化设计与高速扩展
Thor 的接口布局进行了优化,所有外部接口集中在载板一侧,大幅简化了机器人内部的布线流程,降低了集成难度。其核心接口包括:
电源接口:支持 USB-C 供电(最高 240W),兼容主流工业电源,同时 USB-C 接口可兼顾数据传输;
显示接口:配备 HDMI 2.1 与 DisplayPort,可连接外部屏幕实时查看机器人视角或调试界面;
网络与高速接口:1 个 10G 以太网口满足常规数据传输,1 个 QSFP28 高速接口(理论速率 200Gbps)是亮点 —— 可直接连接高带宽设备(如多通道相机、高速电机控制器),实现传感器数据与控制指令的低延迟传输,弥补了缺少额外 M.2 插槽的不足;
扩展接口:集成 Wi-Fi 与蓝牙模块(天线需单独安装),支持无线调试与数据传输;另有多个 USB 接口与调试 USB 口,方便连接键盘、U 盘等外设。
不过,相较于前代AGX Orin,Thor 也存在部分接口简化:取消了 GPIO 40 接口与专用相机接口,可能对依赖传统 GPIO 控制的简单传感器(如红外测距模块)或旧款相机的兼容性造成影响。但凭借 QSFP28 的高速扩展能力,开发者可通过转接板实现多设备连接,一定程度上弥补了接口类型的局限。
三、核心功能:从仿真到实战的全流程支持
Jetson Thor 不仅是算力载体,更通过软件生态与功能设计,覆盖了机器人开发的 “仿真 - 调试 - 部署” 全流程,尤其在硬件在环(HIL)测试、AI 模型部署、多模态数据处理等场景中表现突出。
1. 硬件在环(HIL):仿真与实战的 “桥梁”
在机器人开发中,“软件在环(SIL)” 仅能验证算法逻辑,而 “硬件在环” 可模拟真实硬件运行环境,大幅降低实际部署风险。Thor 的 HIL 方案流程清晰:
仿真端:在工作站(PC)上运行 Isaac Sim(NVIDIA 机器人仿真平台),搭建机器人虚拟环境,生成相机图像、关节状态等传感器数据;
算力端:Thor 通过本地 Wi-Fi 与工作站通信,接收仿真生成的传感器数据,运行AI 政策模型(如 Groot 视觉语言动作模型);
闭环控制:Thor 解析数据后输出关节控制指令(如电机新位置),回传给工作站;仿真平台根据指令更新虚拟机器人状态,生成新的传感器数据,形成闭环。
这种模式下,Thor 完全模拟真实机器人的 “大脑” 角色,从其视角看,仿真数据与真实传感器数据无本质差异。开发者可通过 HIL 测试优化算法(如调整 Groot 模型的动作精度),避免直接在真实机器人上调试导致的硬件损坏风险。文档中演示的 “螺母分拣任务” 便基于此方案:仿真中随机改变容器位置,Thor 运行 Groot 模型解析相机图像,自主决策机械臂动作,分拣成功率达到行业实用标准。
2. AI 模型部署:从视觉决策到语言交互
Thor 对主流AI 模型的兼容性极强,可直接部署多类关键模型:
Groot 视觉语言动作模型:作为视觉 - 动作映射的核心模型,Groot 能接收相机图像(如螺母、容器的视觉信息),结合自然语言指令(如 “将红色容器的螺母倒入黄色容器”),生成机械臂关节控制指令,实现 “所见即所得” 的任务执行;
视频分析模型:支持实时目标检测与异常识别,文档中演示了“工厂安全监控” 场景 —— 模型可检测视频中的人员、梯子、安全帽等目标,自动识别 “未戴安全帽站在梯子上” 的危险行为,并生成告警,响应延迟低于 100ms;
大语言模型(LLM):支持本地运行大参数模型,如 Llama 3.3(700 亿参数)与 Llama 3.2(30 亿参数)。测试显示,700 亿参数模型虽响应稍慢(单次问答约 5-8 秒),但答案准确性高;30 亿参数模型响应速度提升 3 倍,可满足机器人实时语言交互需求(如语音控制指令解析)。
3. 软件生态:开箱即用的开发支持
Thor 预装基于 Ubuntu Linux 的系统,兼容 NVIDIA 全套 AI 软件堆栈:CUDA(算力调度)、cuDNN(深度学习加速)、TensorRT(推理优化)等组件已预装,开发者无需手动配置环境;同时支持 ROS 2(机器人操作系统)、Isaac Lab(机器人学习平台),可无缝衔接机器人运动控制、路径规划等开发工具。这种 “开箱即用” 的生态设计,大幅缩短了从硬件到手到算法部署的周期。
四、产品对比:与 Jetson AGX Orin 的关键差异
作为 Jetson 系列的两代旗舰产品,Thor 与 Orin 的定位与特性差异明显,具体可从以下维度对比:
对比维度 | Jetson Thor | Jetson AGX Orin |
核心架构 | Blackwell | Ampere |
AI 性能 | 约为 Orin 的 7.5 倍 | 基础旗舰性能 |
能效比 | 约为 Orin 的 3.5 倍 | 传统能效水平 |
散热设计 | 超大散热片 + 热管 + 可拆改造 | 常规散热片 + 风扇 |
接口布局 | 接口集中一侧,QSFP28 高速接口 | 接口分散,含 GPIO 40 与专用相机口 |
核心模块尺寸 | 100×87×15mm | 相近尺寸 |
扩展灵活性 | 依赖 QSFP28 高速扩展 | 支持更多传统接口扩展 |
总体来看,Orin 更适合中小型机器人(如移动机器人、单臂机械臂),而 Thor 凭借更强的算力、更高的能效与灵活的散热改造,更适配人形机器人、多臂协作机器人等复杂设备。
五、优缺点与未来应用展望
1. 核心优势
超强算力与能效:128GB 内存 + Blackwell 架构,支撑百亿参数模型本地运行,能效比领先行业;
部署灵活:核心模块紧凑,散热可改造,适配机器人不同安装场景;
生态完善:兼容 Isaac Sim、ROS、Groot 等工具,开发门槛低;
高速扩展:QSFP28 接口满足高带宽设备连接需求,弥补接口类型局限。
2. 待优化点
接口简化:缺少 GPIO 40 与专用相机接口,对传统传感器兼容性不足;
存储扩展:无额外 M.2 插槽,需通过 QSFP28 转接实现高速存储扩展。
3. 未来应用
从行业视角看,Thor 还可广泛应用于:
工业人形机器人:驱动多关节协同运动,处理精密装配、物料分拣任务;
自动驾驶小车:实时解析激光雷达、摄像头数据,实现路径规划与障碍物规避;
服务机器人:通过 LLM 实现自然语言交互,结合视觉模型完成家居清洁、物品递送等任务。
结语
NVIDIA Jetson Thor 以 “高性能、高灵活、高兼容” 的核心特性,重新定义了机器人 “大脑” 的标准 —— 它不仅是算力模块,更是连接仿真与实战、算法与硬件的关键载体。对于开发者而言,Thor 降低了复杂机器人开发的门槛,无需依赖昂贵的数据中心算力,即可实现从 AI 模型训练到硬件部署的全流程验证;对于行业而言,Thor 的推出将推动人形机器人、多模态协作机器人等产品的商业化进程,加速 “机器人走进现实” 的落地速度。
随着后续生态的持续完善(如接口转接方案、专用算法优化),Jetson AGX Thor 有望成为机器人开发领域的 “标配算力核心”,为更多创新应用提供动力。