上海信弘智能科技有限公司,信弘,智能,信弘智能科技,Elite Partner,Omniverse,智能科技,NVIDIA GPU,NVIDIA DGX, vGPU,TESLA,QUADRO,AI,AI培训,AI课程,人工智能,解决方案,DLI,Mellanox,IB, 深度学习,RTX,IT,ORACLE 数据库,ORACLE云服务,深度学习学院,bigdata,大数据,数据安全备份,鼎甲,高性能计算, 虚拟机,虚拟桌面,虚拟软件,硬件,软件,加速计算,HPC,超算,服务器,虚拟服务器,IT咨询,IT系统规划,应用实施,系统集成
国际期刊发表!NVIDIA Isaac Sim 赋能,上海信弘×申昊科技共创轨交运维新范式
上海信弘赋能创新
重磅喜讯!热烈祝贺上海信弘智能科技有限公司(ZENTEK)提供关键技术支持,由杭州申昊科技团队主导的机器人仿真领域研究,成功发表论文并荣获国际权威认可!
Robotic Simulation Systems and Intelligent Offline Teaching for Urban Rail Transit Maintenance
《城市轨道交通维护的机器人仿真系统与智能离线教学》
该论文已成功发表于国际知名期刊《MDPI Electronics》!本研究不仅为轨道交通行业的智能运维提供了新的技术手段,助力了其智能化发展,还能降低运维成本和安全风险,展现出广阔的实际应用前景,在技术方面也取得双仿真系统协同开发和结构化离线示教方案的两大核心突破。
该研究成果依托全球领先的 NVIDIA Isaac Sim™ 统一机器人仿真平台,为城市轨道交通智能检测提供了创新性解决方案,解决了传统仿真工具无法精准模拟材质或柔体,以及图形渲染和物理效果支持有限的行业痛点,吸引了来自全球机器人领域专家的关注与研讨。
作为 NVIDIA 精英级合作伙伴 —— 上海信弘基于对申昊科技团队需求的深入调研,面向团队开展了针对性的技术培训,以专业视角为团队提供 NIVIDA Isaac Sim 研发支持,致力于赋能申昊科技团队推进研究进程。这一开创性研究成果最终转化为高质量国际论文,标志着工业场景下轨道智检领域先进机器人仿真技术的应用落地,为行业智能化发展注入了强劲动力。
什么是 NVIDIA Isaac Sim?
基于 NVIDIA Omniverse 构建的 Isaac Sim 具有完全可扩展性。 这意味着可以构建自己的基于通用场景描述(OpenUSD)的自定义 模拟器,或将核心 Isaac Sim 技术集成到现有的测试和验证管道中。
PART 01
深度协作·引领未来
共创核心成果

双方引入列车底盘的高保真模型,依托 NVIDIA Isaac Sim 的 PhysX 物理引擎,实现对于摩擦、阻尼等关键物理属性的精准模拟,构建出工业级的数字孪生场景
ROS 系统与数字孪生双向互通
上海信弘主导完成 ROS 系统与仿真平台的实时对接,确保机器人的传感器数据、位姿信息实时同步控制端,并实现命令下发与巡检任务执行的流程闭环,极大提升了技术开发过程中的调试与验证效率。
合成数据规模
基于 RGB 图像 + 激光雷达的多传感器数据采集模式,项目在测试和验证阶段连续运行五日,自动生成覆盖多类典型故障的合成数据集,解决了传统流程中缺少地面实例数据的问题,为后续工业视觉算法的训练提供了坚实的数据支撑。
02
关键交付路径
技术培训
上海信弘输出覆盖 Omniverse 操作、CUDA 加速、数据生成等 8 门课程,全面赋能申昊团队掌握前沿数字孪生技术
协同开发
双方团队围绕移动机器人与机械臂的联合任务,优化仿真环境底层设置,构建具备联动逻辑的真实可执行训练空间,打通从仿真到真实任务之间的关键壁垒。
输出完整的“虚拟部署 + 数据验证 + 运维管理”全栈方案,为工业场景下的机器人系统构建提供了可复用的技术模板
03
项目行业价值
项目实现 “仿真-数据-算法-部署”一体化工作流
传统数月级的机器人测试周期大幅缩短,以轻量级资源投入快速验证高价值方案,构建面向轨交运维与工业巡检的可复制数字孪生范式。
这不仅是一次虚拟环境下仿真技术的革新,更是一次工业场景中物理AI世界团队协作方式的进步。上海信弘 与申昊科技,正为轨道交通检测行业智能化打开一条更快、更稳、更强的路径。
PART 02
核心技术·创新科研

Rollingstock Undercarriage Robot
轨道车辆底盘检测机器人
面对城市轨道交通运维中的“底盘检测效率低、现场教学受限”难题
申昊研究团队提出了仿真系统 + 智能离线教学协同解决方案
双仿真引擎融合设计
创新结合 Gazebo(轻量级算法验证)与 NVIDIA Isaac Sim(高保真复杂场景渲染),构建多尺度机器人开发平台,经验证在大型地铁车辆段场景中展现了卓越的性能。二者协同实现从算法开发到材质/物理深度优化的全流程闭环,且仿真系统的学习成本较低,极大地提高了系统的实用性。

基于 NVIDIA Isaac Sim 强大渲染能力构建的地铁巡检仿真场景模型
全流程技术链创新
毫米级环境建模:采用 Trimble X7 激光扫描仪采集车辆底盘点云(1GB+/车厢),经孔洞修复算法生成可仿真模型

通过双面网格化生成的模型有效解决了孔洞问题
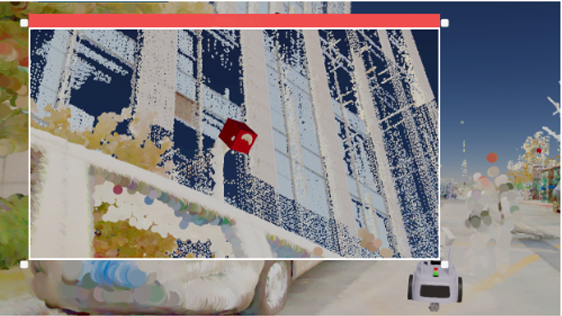
智能标注平台
开发 WebGL 点云标注工具,实现 10000+ 检测目标的矢量坐标标定
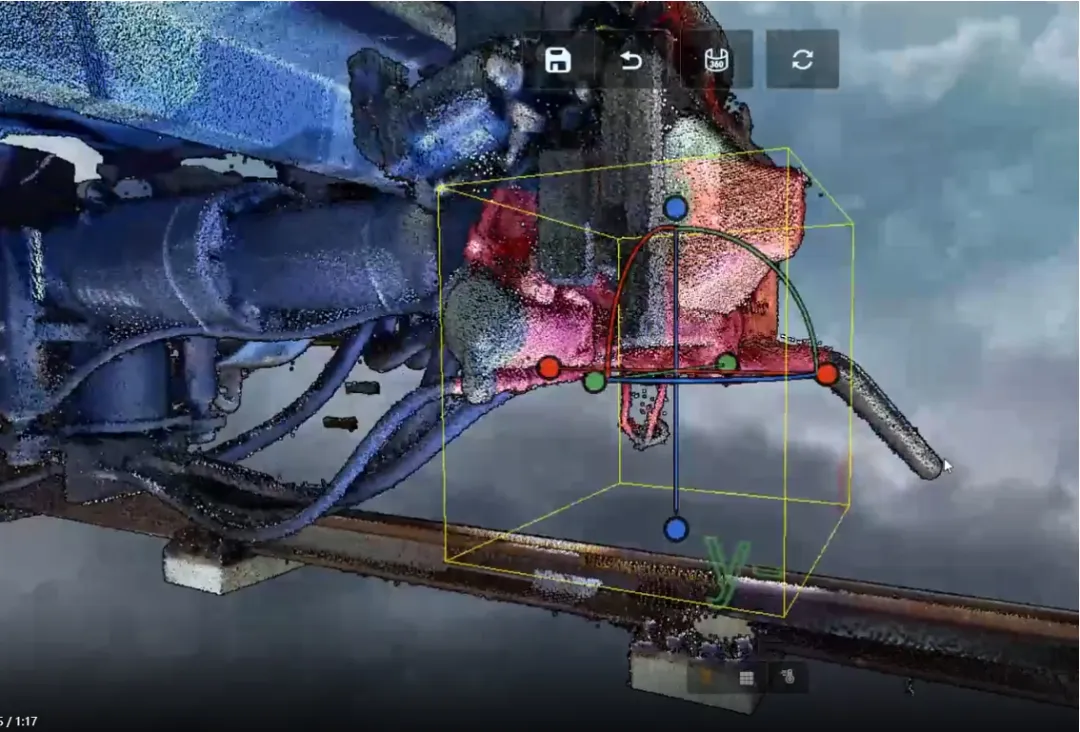
革命性离线教学方案
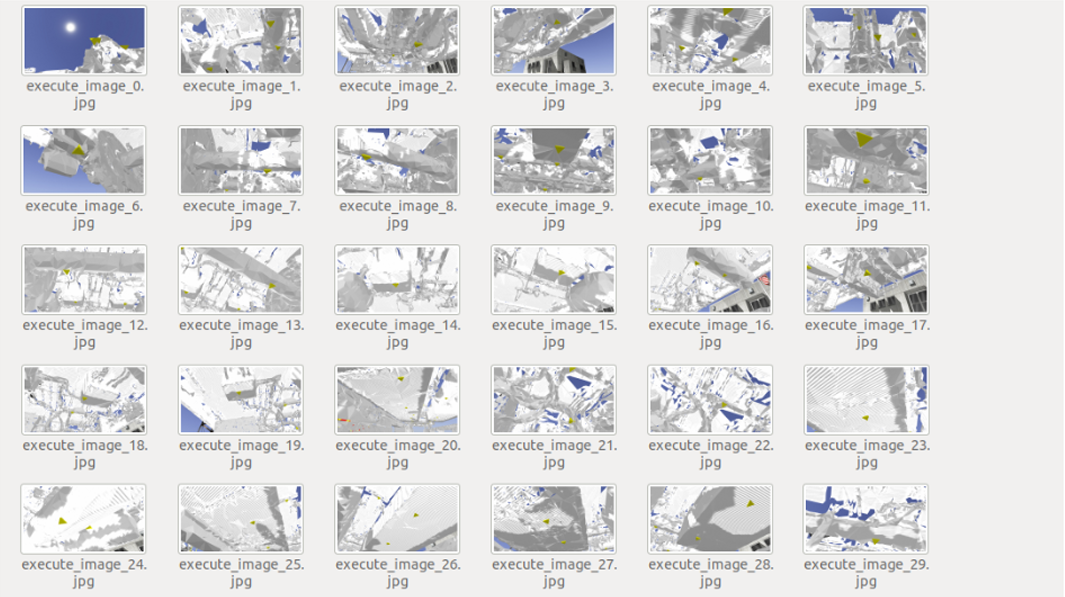
在仿真环境中预编程机械臂检测路径,突破现场 3:00-5:00AM 检修时间窗限制
创新性融合导航点设置、遥操作机械臂控制及自动数据记录,有效优化了示教流程,降低了人员现场示教作业风险并极大的缩短了机器人部署时间
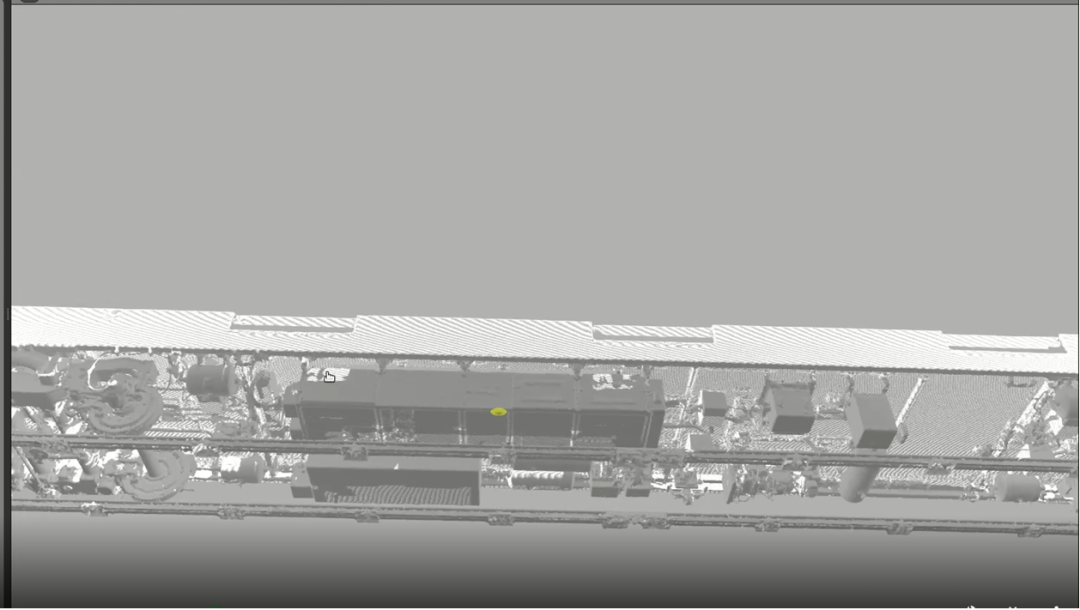
集成 Octomap 障碍物模型( 5cm 精度),保障机械臂在狭窄地沟避障
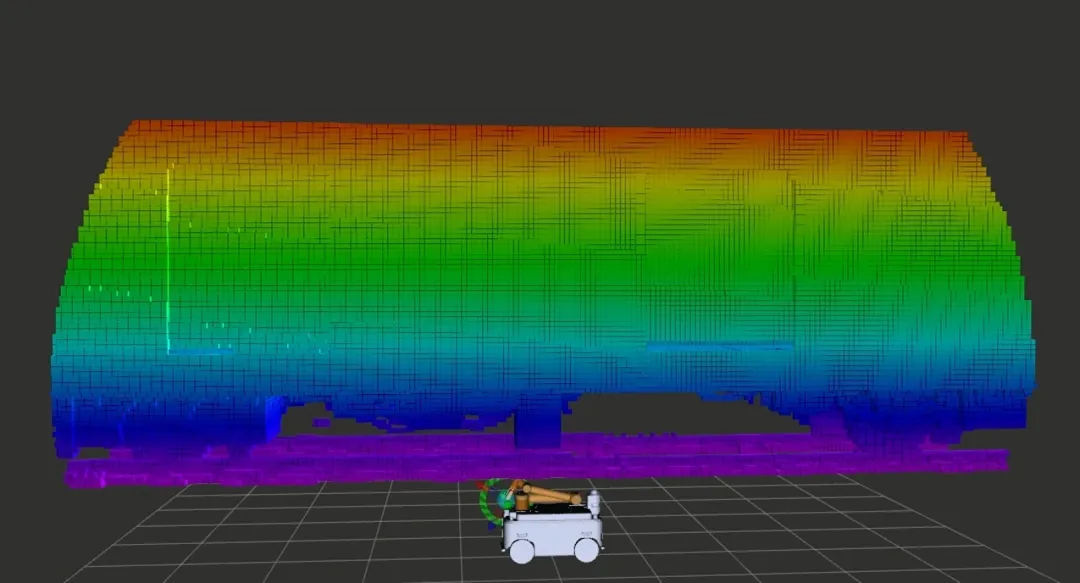
分辨率为 5 厘米的 Octomap,仅展示机器人正上方 5 米范围内的部分
﹀
﹀
﹀
实验成功证明:在六节编组地铁( 960 检测点)中实现 84% 教学成功率
单动作教学的耗时从现场手动 5 分钟,压缩至离线教学的 30 秒

实拍精准还原目标检测与图像采集效果
PART 03
Isaac Sim 价值优势
1
高精度物理仿真
基于 PhysX 物理引擎
实现 ±0.02mm 级传感器仿真精度
为机械臂路径规划与避障提供真实感支撑

2
复杂场景实时渲染
成功加载六节编组地铁高精模型
RTX 实时光线追踪技术克服传统仿真器渲染瓶颈

3
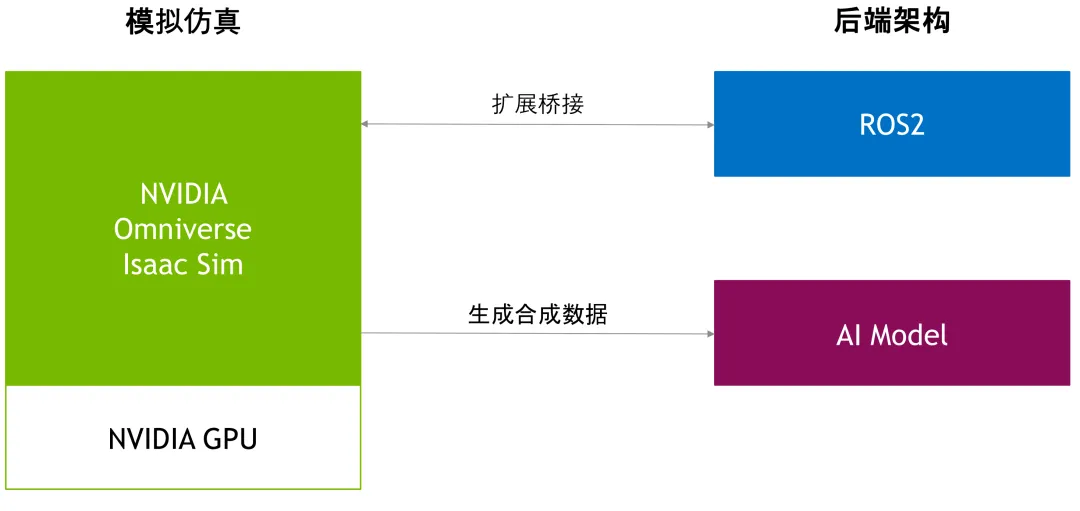
ROS 2 无缝集成
借助 ROS 2 Bridge
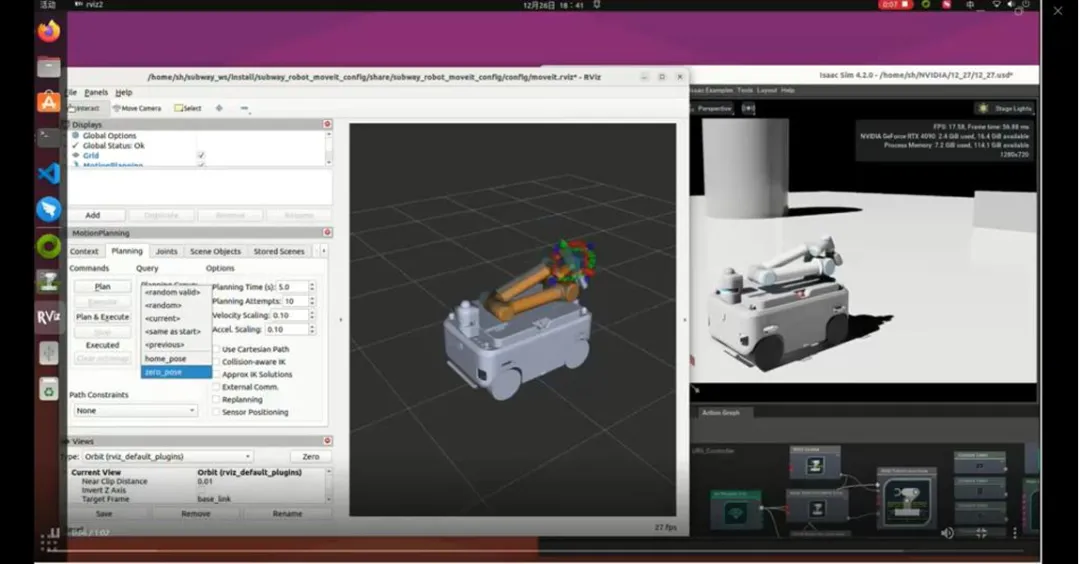
实现 MoveIt 运动规划与虚拟机械臂状态实时双向同步

机器人运动控制 · 虚实训练系统
依托 NVIDIA Isaac Sim 强大的高精度仿真与物理建模能力,可构建机器人运动控制与训练系统如图所示
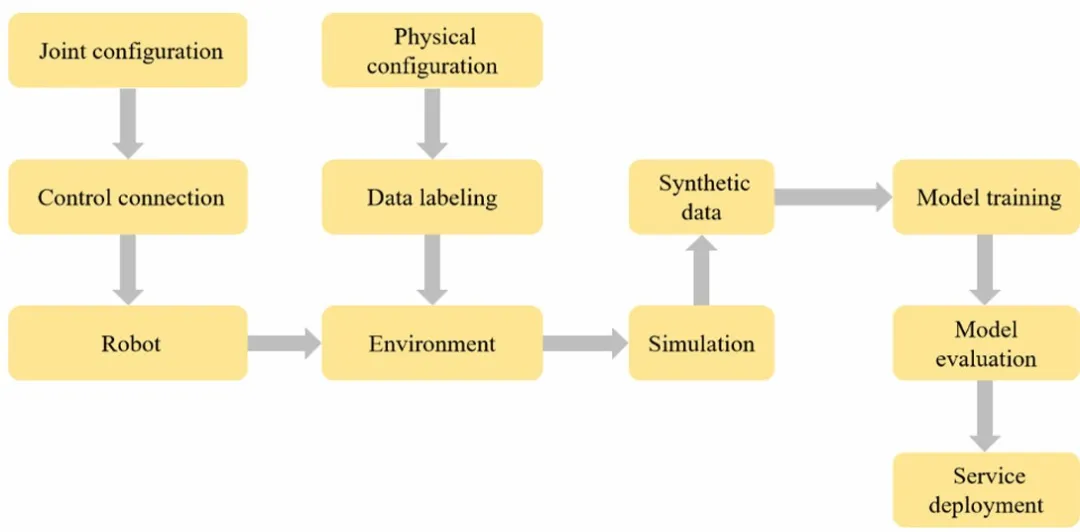
虚拟环境中采集的传感器数据可以实时对接 ROS 2,实现机器车定位导航、机械臂任务执行与反馈优化。
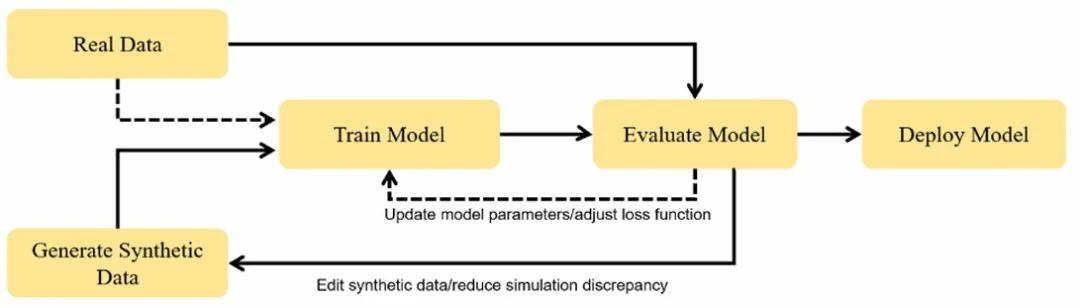
配合真实物理属性配置和仿真数据标注,生成高质量训练数据,助力大规模目标检测模型训练。